S.E.A.T.A
S.E.A.T.A.

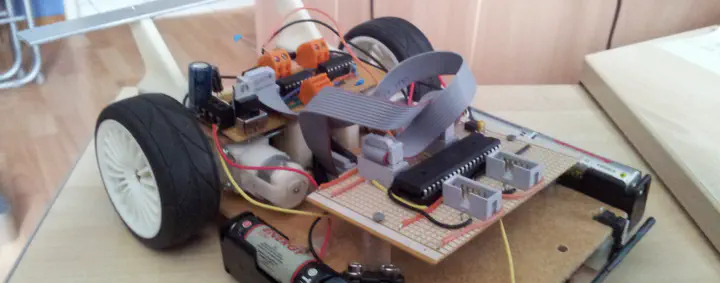
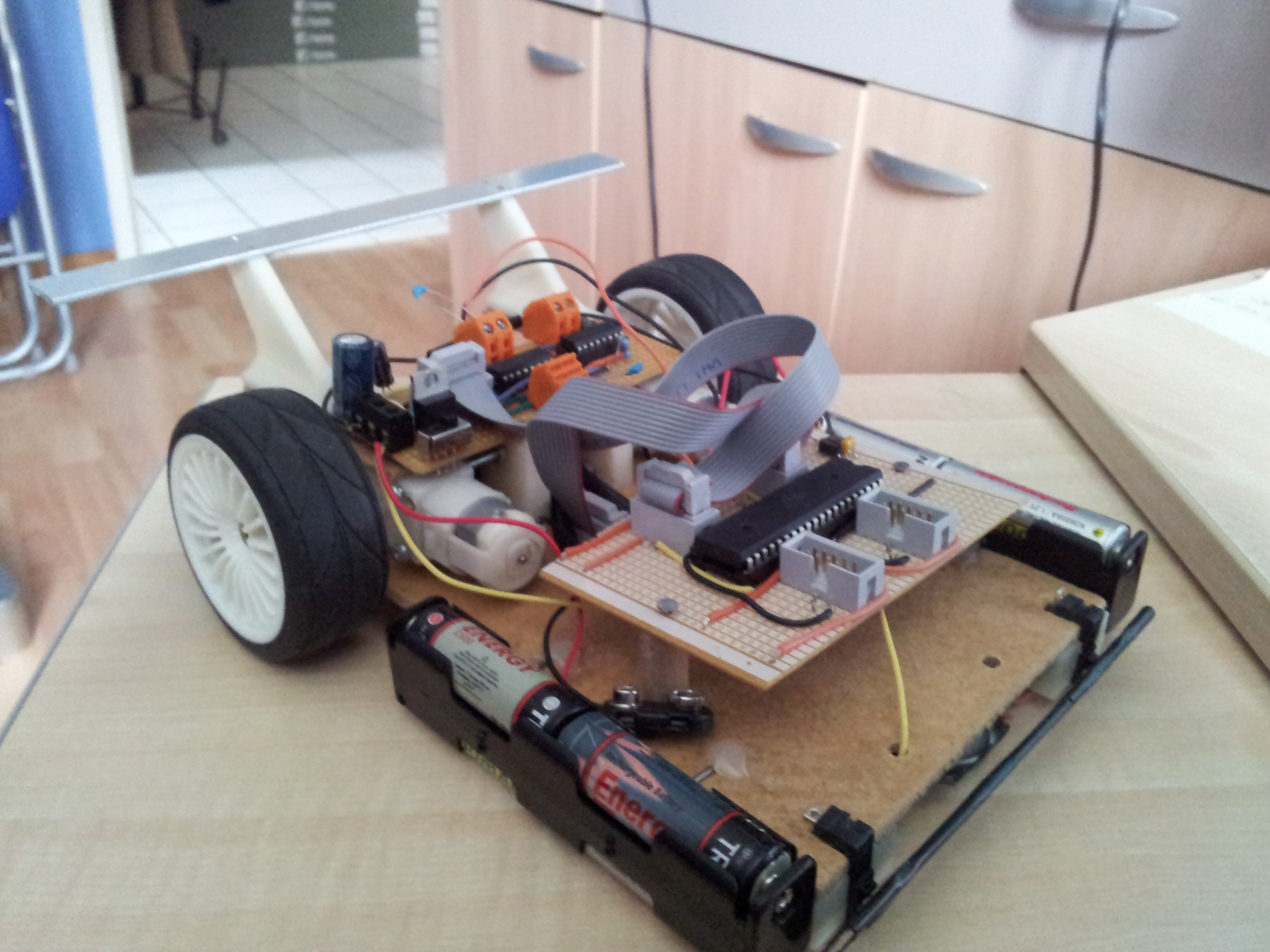
S.E.A.T.A. is a robotics project where I participated in high school. The goal of the project was to design a robot from the ground up, that could follow a black line, avoid obstacles, and send a ball into a goal. This robot was then used in a county robotics contest between high schools, where S.E.A.T.A. won first place in speed.
My participation in the project consisted of designing the control board based on a ATMega8535, a power board, and a motor control board.
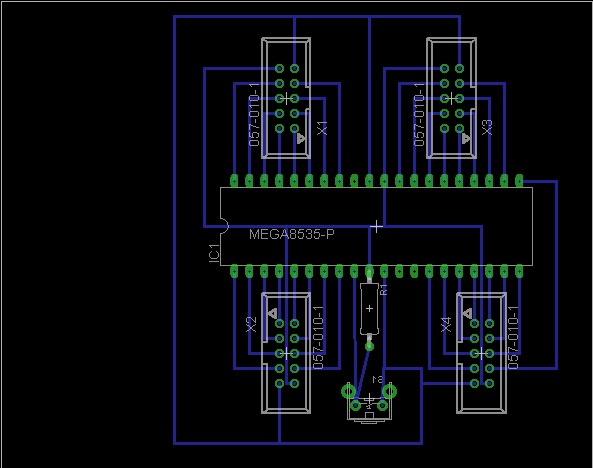
The control board
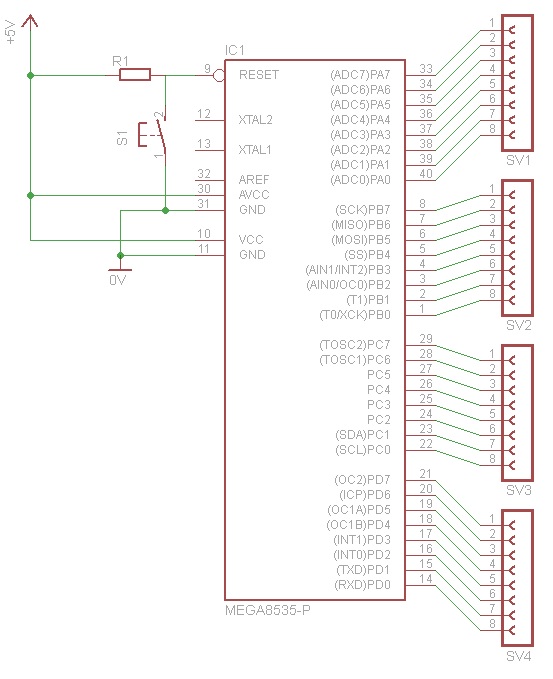
A modular style of “plugs” that both supplied low current power and gave 8 pins of a port for communicating with the MCU was devised. It allowed for quick prototyping and debugging, while keeping the footprint of the board relatively small.
As the ATMega8535 only used 15mA of current, this setup was deemed sufficient for the robot.
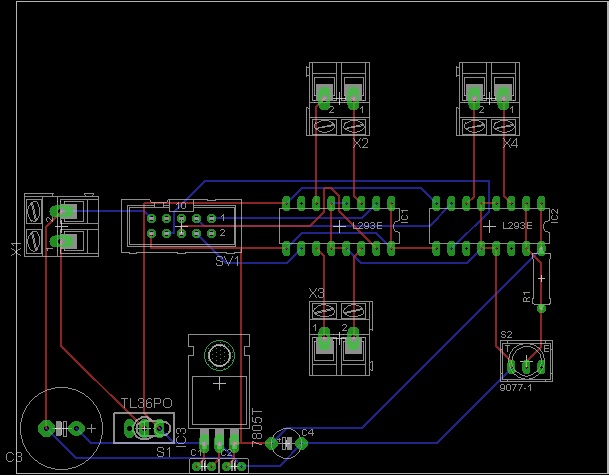
The power & motor control board
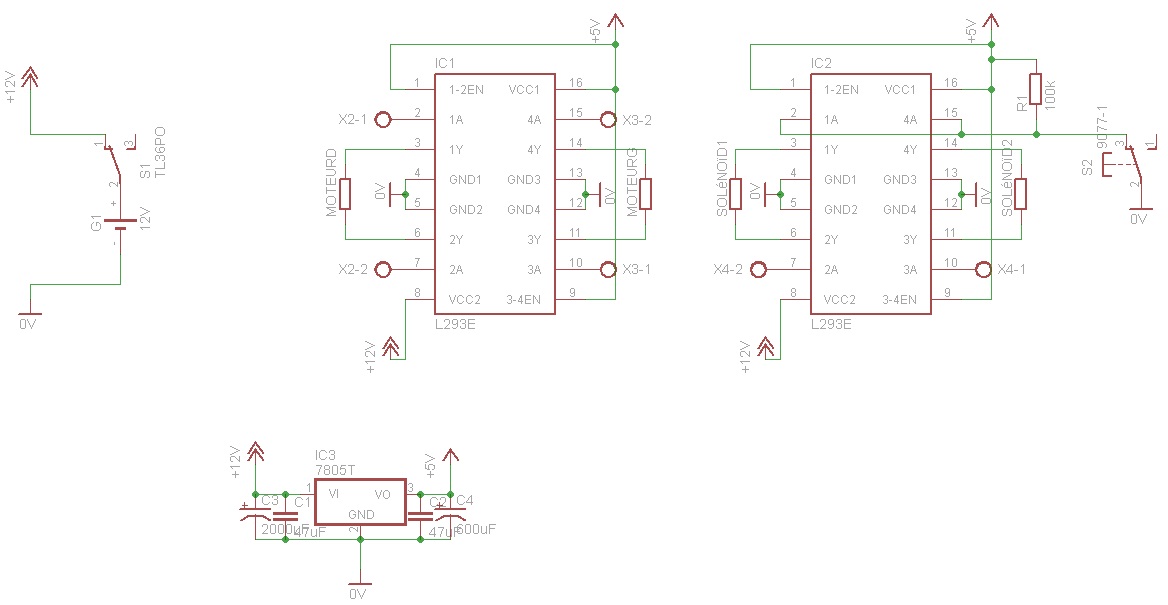
The most power hungry devise of the robot, was the two lateral motors. As such, the power regulation and motor control board were unified to limit potential power issues. However, this also caused some issues that needed to be solved due to the motors and the MCU sharing the same power rail.
Under the hood
Demo
Ashley W.D. Hill
PhD Researcher Engineer specialized in machine learning applied to robotics
My research interests include Machine Learning, Robotics, Electronics, and other oddities.